Konzept
Erfassung von
- Position
- Form
- Interaktion

Funktion
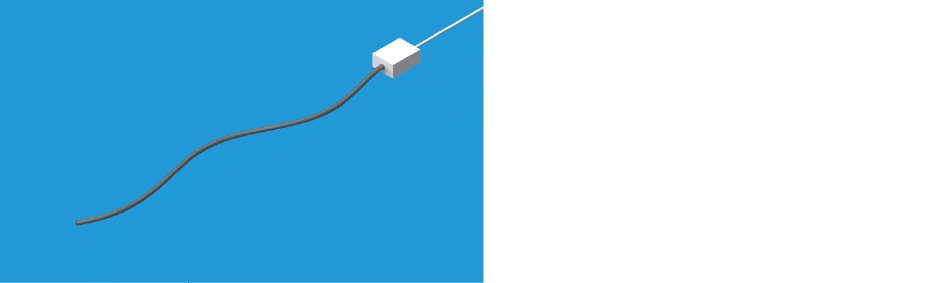
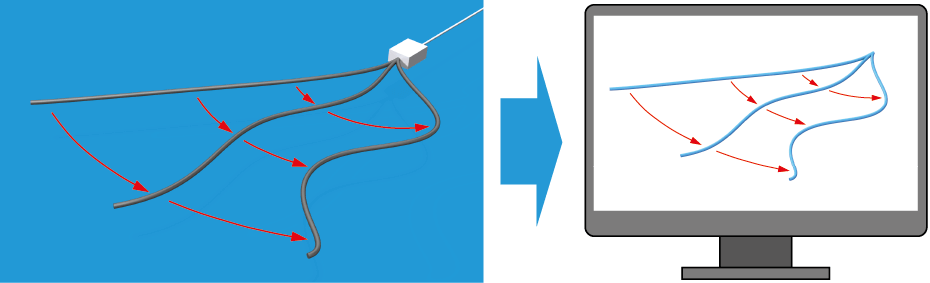
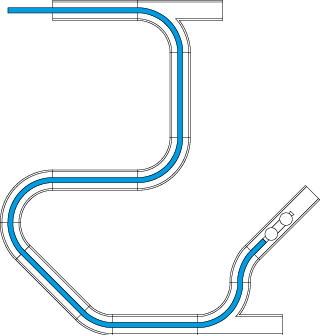
In unseren kabelartigen Formsensoren sind helikal gewickelte Folien integriert. Bei Biegungen des Kabels ergeben sich Abstandsänderungen zwischen den Folienrändern. Diese werden optisch erfasst und an einen auswertenden Computer weitergeleitet. Dieser baut die Abstandsinformationen zu einem virtuellen Modell der Kabelform zusammen.
Durch die sehr kompakte Bauform bietet der Sensor eine hohe Messdichte sowie Platz für eine Nutzfüllung (im Bild weiß). Dort können z.B. elektrische Leitungen, Lichtleitfasern oder Bowdenzüge eingearbeitet sein.

Mögliche Anwendungen
Für typische Anwendungen wird die Position und Orientierung am Sensorende bestimmt.
Bei einigen Anwendungen ist auch die aktuelle Lageausprägung (Form) relevant.
Für alle Anwendungen lassen sich Überwachungen realisieren: Ist ein Sensorteilbereich in einer kritischen Position? Hat der Sensor eine kritische Form eingenommen? Sind Teilbereiche kritischen Geschwindigkeiten ausgesetzt?
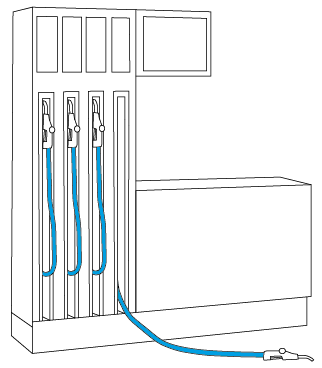
Anwendungen für den kabelartigen Formsensor ergeben sich überall dort, wo flexible Verbindungen überwacht werden müssen, z.B. Kabelpakete oder Tankschläuche.
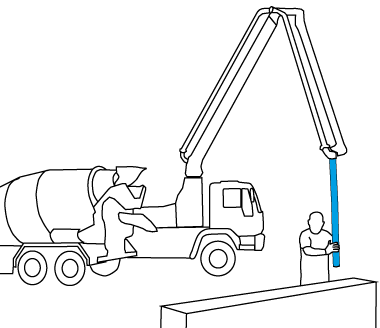
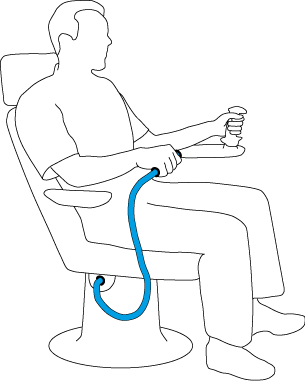
Der Sensor kann zum Führen von schweren Maschinen oder Handhabungseinrichtungen verwendet werden. Zum Beispiel können Kraneinrichtungen automatisch nachgeführt werden.
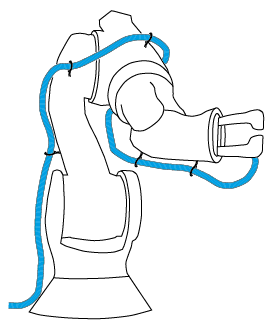
Für Industrieroboter entsteht ein hoher Anteil an Ausfallzeiten dadurch, dass sie ihre eigenen Kabelverbindungen abreißen. Ein Roboter mit Formsensor in der Kabelschleppe kann gestoppt werden, bevor ein Schaden entsteht. Ausfallzeiten können so minimiert werden.
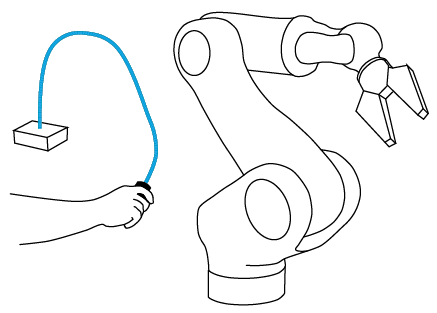
Durch direkte Vorgabe von 3D-Positionen können Bewegungstrajektorien intuitiv vorgegeben werden. Bisher müssen Wertekombinationen für jedes Gelenk einzeln eingestellt werden.
Die Sensoren können zur Interaktion verwendet werden. Dabei ist eine direkte und intuitive Vorgabe von Positionsinformation mit sechs Freiheitsgraden möglich. So können Maschinen mit vielen Gelenken intuitiv gesteuert werden, indem einfach Endpositonen vorgegeben werden und die Gelenke mit inverser Kinematik automatisch eingestellt werden. Damit kann das mühsame Erlernen von Joysticksteuerungen entfallen.
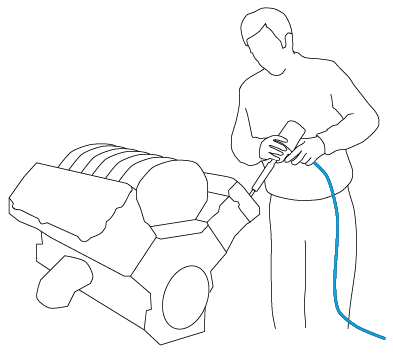
Bei Montagevorgängen können manuell geführte Werkzeuge in Abhängigkeit der Position konfiguriert werden. So kann z.B. ein Drehmomentschlüssel für verschiedene Schrauben unterschiedliche Drehmomente einstellen.
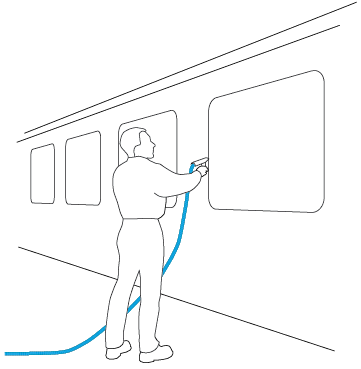
Die Lageinformation des Sensorkabels wird mit hoher Frequenz aktualisiert. Dadurch kann die Geschwindigkeit an der Sensorspitze genau bestimmt werden. Mit dieser Information kann z.B. Klebstoff in Abhängigkeit der Handbewegung automatisch dosiert werden. Es können auch Bewegungstrajektorien für ein "Quality-of-Service-Document" aufgenommen werden.
Der Sensoreinsatz ist in sog. Rohrmolchsystemen möglich, um Schadstellen lokalisieren zu können. Für jede Kamerabildinformation ergibt sich die genaue Position. So kann z.B. ermittelt werden, wie durch eine Bohrung von aussen eine Schadstelle erreichbar ist.